

一、库卡机器人四边形程序
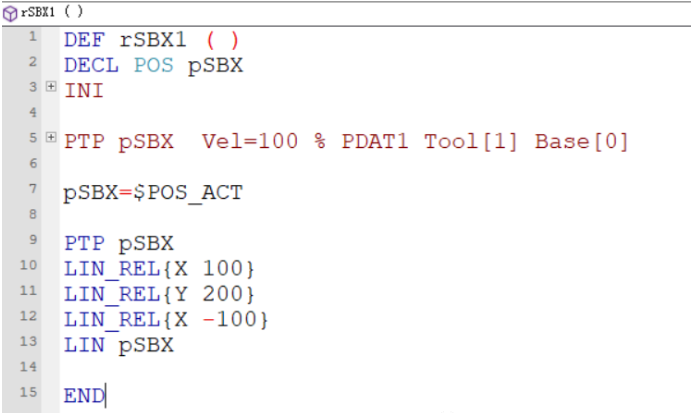
1、四边形程序1:利用偏移指令PTP_REL或者LIN_REL
DEF rSBX1 ( )
DECL POS pSBX
INI
PTP pSBX Vel=100 % PDAT1 Tool[1] base[0]
pSBX=$POS_ACT
PTP pSBX
LIN_REL{X 100}
LIN_REL{Y 200}
LIN_REL{X -100}
LIN pSBX
END
程序图片:
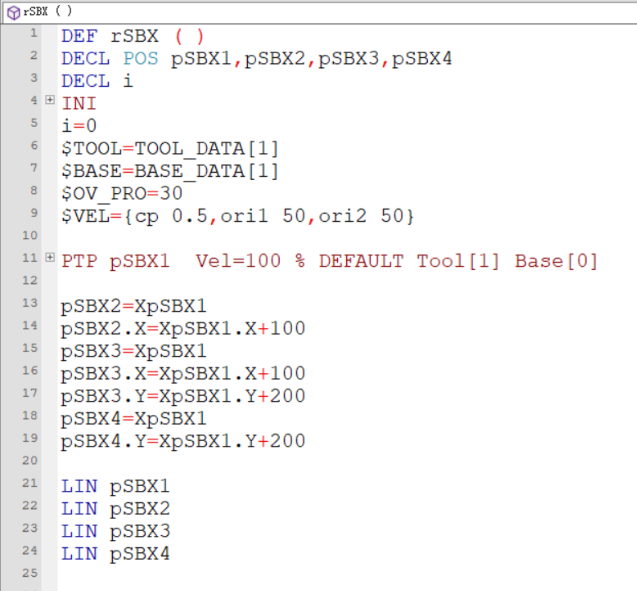
2、四边形程序2:利用点位计算四边形各个点在移动
DEF rSBX ( )
DECL POS pSBX1,pSBX2,pSBX3,pSBX4
DECL i
INI
i=0
$TOOL=TOOL_DATA[1]
$base=base_DATA[1]
$OV_PRO=30
$VEL={cp 0.5,ori1 50,ori2 50}
PTP pSBX1 Vel=100 % DEFAULT Tool[1] base[0]
pSBX2=XpSBX1
pSBX2.X=XpSBX1.X+100
pSBX3=XpSBX1
pSBX3.X=XpSBX1.X+100
pSBX3.Y=XpSBX1.Y+200
pSBX4=XpSBX1
pSBX4.Y=XpSBX1.Y+200
LIN pSBX1
LIN pSBX2
LIN pSBX3
LIN pSBX4
END
程序图片:
更多资讯,库卡机器人